1. 硬件配置
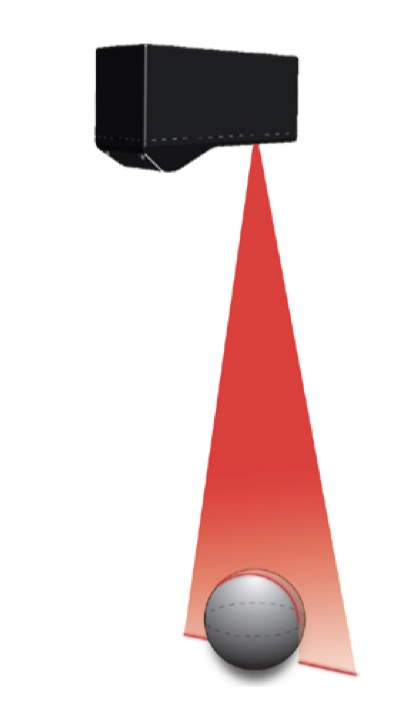
激光相机介绍
-
公司:LMI Technologies Inc | 荷兰TKH子公司
-
系列:Gocator系列|轮廓传感器
-
名称:Gocator 2450
使用文档目录
硬件清单
- windows PC | 激光相机|电源适配器|网线
硬件安装
传感器可以连接到计算机的以太网端口进 行设置,也可以连接到编码器、光电管或 PLC 等设备。

安装成功后,传感器有指示灯显示
蓝色指示灯:通电成功
黄色指示灯:激光发射器激活
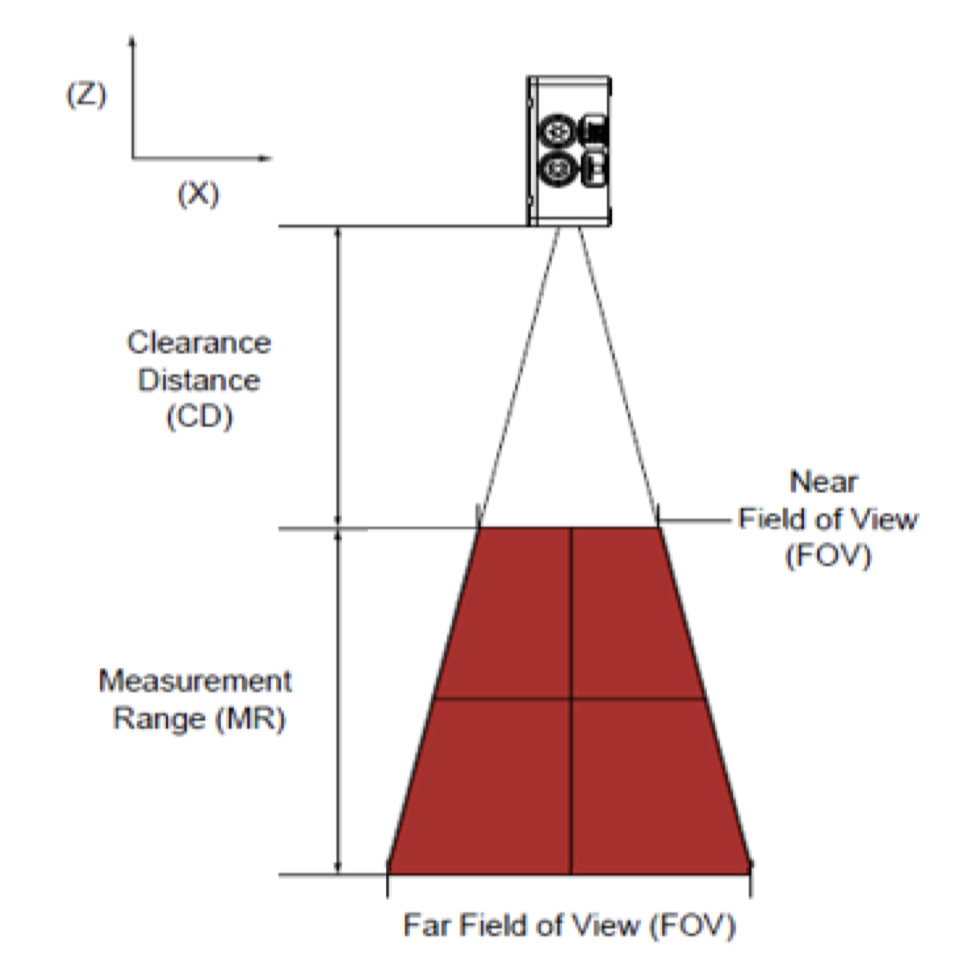
工作范围:
- CD:270mm
- MR:550mm
- FOV:145-425mm
2. 软件配置
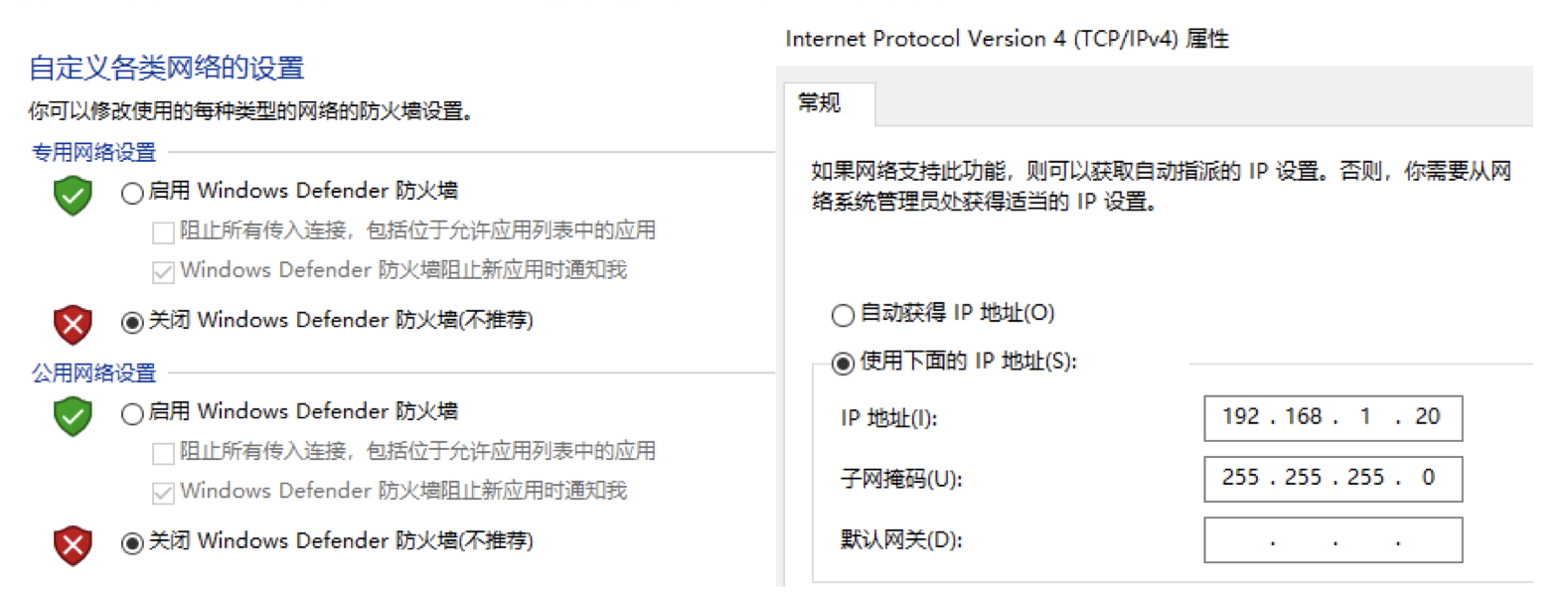
2.1 设备端网络设置
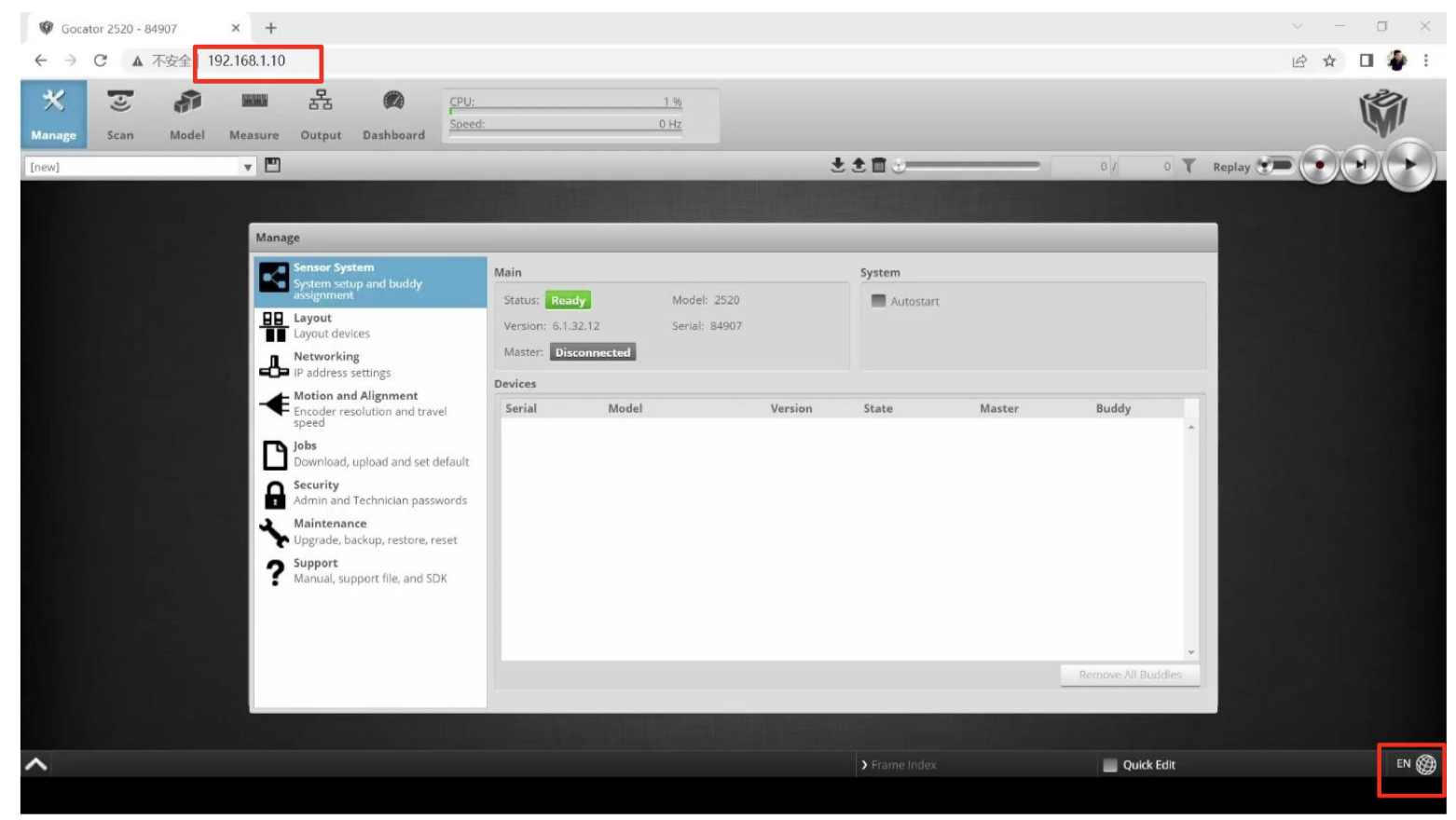
通电后,将系统防火墙关闭,并将连接传感器得网卡 IP 地址修改成跟传感器同一网段。 传感器默认 IP 地址为 192.168.1.10。
2.2 打开传感器界面
IP 地址修改完成后,浏览器地址栏输入传感器 IP 地址后即可进入,推荐使用谷歌浏览器,如进入到以下界面表示连接成功。
2.3 软件调试
软件操作界面可参考Gocator 界面概述及固件更新.pdf
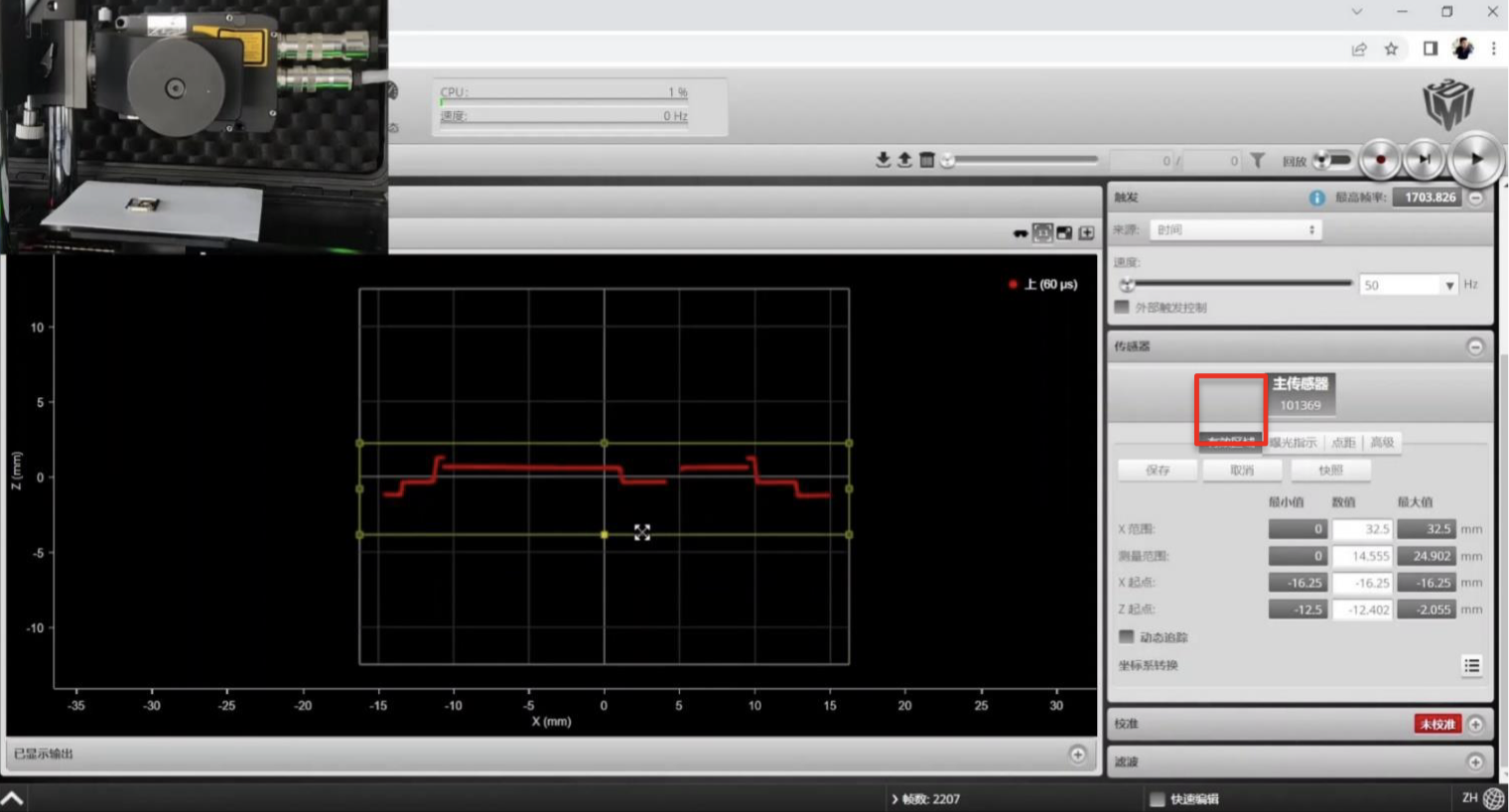
2.3.1 选取有效区域
放置被测物,时间模式开启传感器,调整合适曝光,视野中可见清晰轮廓线,前后移动平台(被测物)Y 方向并观察视图区轮廓,保证整个被测物都在视野中,如部分区域超出视野,需继续调整传感器与被测物之间距离直至实现。选择有效区域。 扫描界面→传感器→有效区域→选择,可出现黄色选择框,可以自由调节也可输入区域位置和大小,选择合适的有效区域并保证被测物所有位置都在有效区域内,设置完成后点击保存。
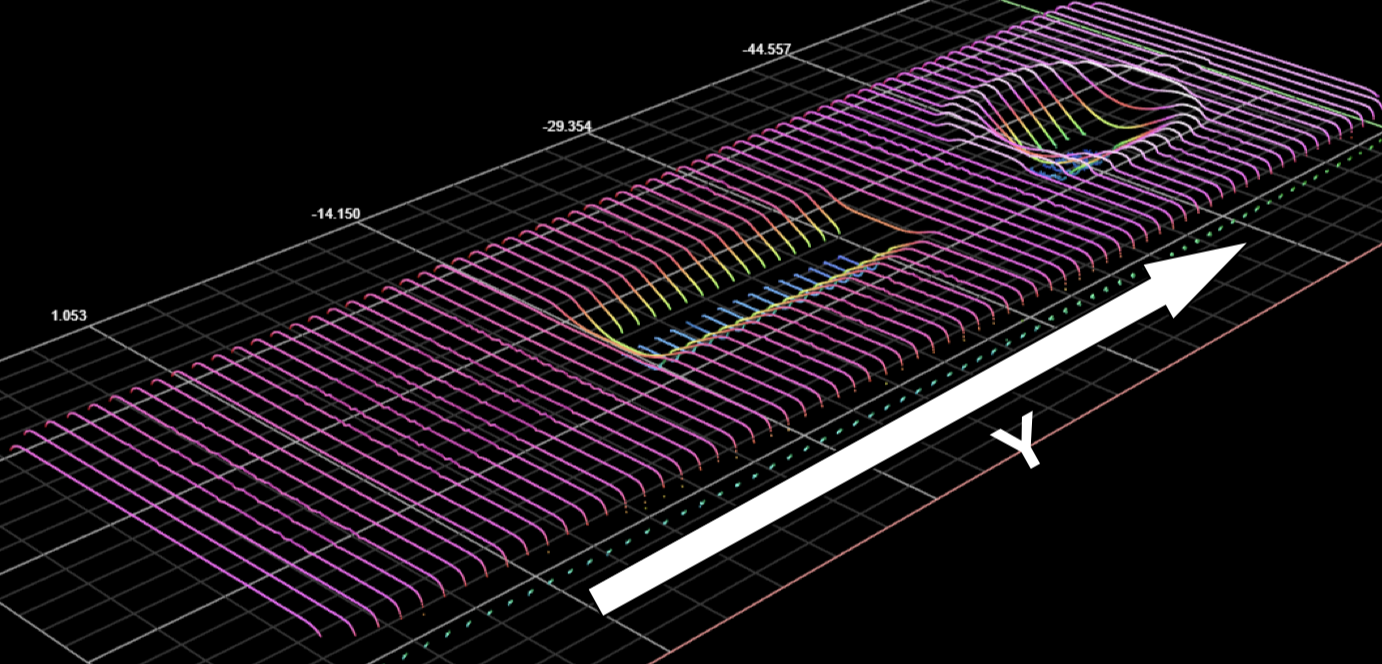
2.3.2 点云的形成
点云其实是很多表面轮廓沿着垂直于轮廓线的方向(点云的 Y 方向)排列而成的立体图,如下图,要获取这样的图像,需要被测物和传感器一边做相对运动一边采集轮廓,这样传感器把采集到的所有不同位置的表面轮廓按照 Y 方向依次排列,也就形成了点云,我们通常把这个过程称为点云的扫描。
2.4 点云获取
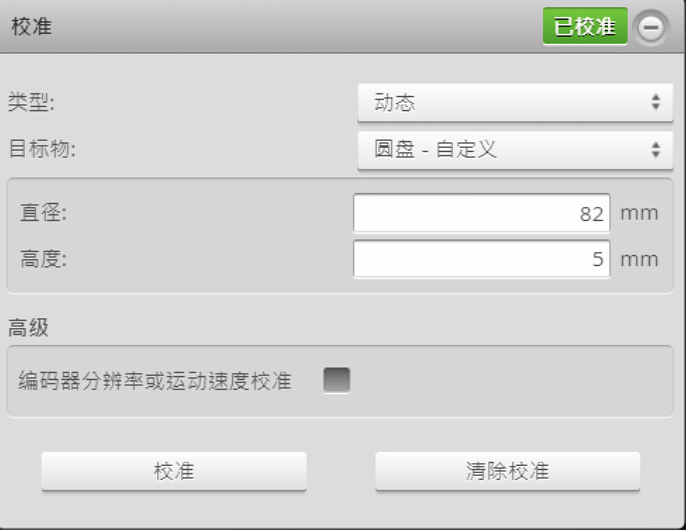
2.4.1 校准
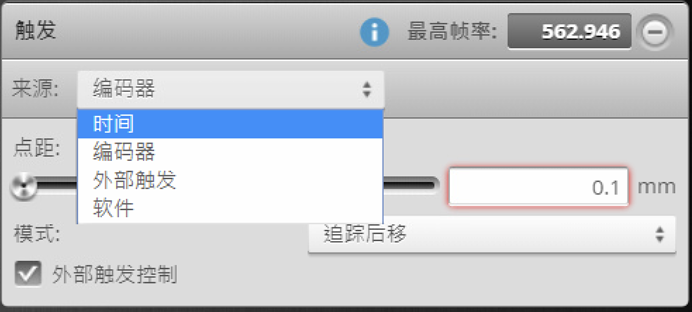
三维空间的点云是由二维点云轮廓切片按相等间距排列,此间距需要进行校准计算。
间距可以通过相对运动的速度与时间来计算。
使用圆盘校准的设置如下,使用自动时间来触发生成轮廓切片

2.4.2 产品扫描
开启传送带与激光扫描开关后,将圆盘放置在传送带上,软件可自动完成校准。
完成间距校准后,开启激光扫描与传送带,将待测产品经过传送带时可以自动完成扫描与数据的临时缓存。
所有产品扫描完成后,关闭激光扫描,打开数据回放,将扫描的缓存点云数据保存为csv格式。
2.4.3 csv转换为png
csv格式文件可以通过格式转换文件转换为深度图进行yolov8模型训练。
2.4.4 csv转化为bin
import csv
import struct
import os
def read_point_cloud_from_csv(file_path):
"""
从CSV文件中读取激光点云数据。
Parameters:
file_path (str): CSV文件路径。
Returns:
list: 包含激光点云坐标(二进制)的列表。
"""
xlist = []
points = []
with open(file_path, 'r') as file:
csv_reader = csv.reader(file)
y_row_index = None
for row in csv_reader:
if "Y\X" in row:
# 找到包含"Y\X"的行,确定x轴和y轴的值所在的列
y_row_index = csv_reader.line_num
xlist = row[1:]
break
if y_row_index is not None:
for row in csv_reader:
while row[0] != 'End':
y_value = float(row[0]) # 第一个数据为y坐标
for z_str, x in zip(row[1:len(xlist)+1], xlist):
# print(z_str, x)
if z_str != '':
points.append([float(x), y_value, float(z_str)])
break
else:
break
return points
def convert_csv_to_bin(input_folder, output_folder):
try:
# 创建新文件夹
if not os.path.exists(output_folder):
os.mkdir(output_folder)
print(f"文件夹 '{output_folder}' 已创建成功。")
else:
print(f"文件夹 '{output_folder}' 已经存在。请提供一个不同的文件夹名称。")
return
# 获取输入文件夹中的所有文件
files = os.listdir(input_folder)
# 初始化计数器
file_counter = 0
# 遍历文件夹中的文件
for file in files:
if file.endswith(".csv"):
bin_file = f"{file_counter:06d}.bin" # 使用计数器格式化为6位数的字符串
source_path = os.path.join(input_folder, file)
target_path = os.path.join(output_folder, bin_file)
points = read_point_cloud_from_csv(source_path)
with open(target_path, 'wb') as file:
for i in range(0, int(len(points) / 2) * 2, 2):
x1, y1, z1 = points[i]
x2, y2, z2 = points[i + 1]
binary_data = struct.pack('ffffffff', x1, y1, z1, 1.0, x2, y2, z2, 1.0)
file.write(binary_data)
print(f"已转换文件 '{file}' 到文件夹 '{output_folder}',新文件名为 '{bin_file}'。")
# 增加计数器
file_counter += 1
print("所有CSV文件已成功复制到新文件夹。")
except Exception as e:
print(f"发生错误:{e}")
# 指定输入文件夹和新建文件夹的名称
input_folder = "package_depth" # 你的CSV文件所在的文件夹
output_folder = "package_depth_bin2" # 新建的文件夹名称
# 调用函数来处理CSV文件
convert_csv_to_bin(input_folder, output_folder)