Endo-Slam outline
Relative work
数据集
临床应用场景
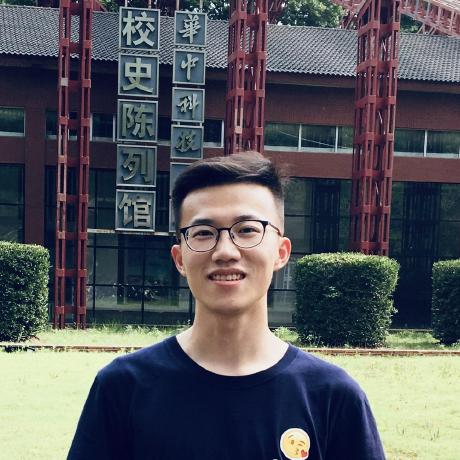
- 消化道与病灶三维可视化
- 实时重建
- 可无级切换三维模型的观察视角
- 病灶范围计算
难点
- 镜面反射容易发生过曝光和欠曝光,比如反光表面
- 半透明物体,如积液区域,将影响特征提取与特征匹配
- 表面均色,将无法提取特征点
- 高度非线性的器官变形
- 场景杂波,如气泡、流体、血液
- 定位漂移现象随重建序列变多而越明显
- 图像质量:镜头移动过快造成二维图像有拖影
- 现有标注数据均通过模型实验获取或计算机建模获取,与临床内镜视频数据有较大差距
论文
重要论文与算法
-
OneSLAM FPS 2-4
-
Artificial intelligence and automation in endoscopy and surgery
- Endoscopic mapping and navigation p174
特征提取
- 2021 Feature Descriptor Learning Based on Sparse Feature Matching
- 有效地从内窥镜图像中提取特征描述,同时获得更密集、更精确的匹配点
- 2023 Adaptive feature extraction method for capsule endoscopy images
- 提升特征点匹配性能
- 2023 NORMAL RECONSTRUCTION FROM SPECULARITY IN THE ENDOSCOPIC SETTING
- 认为高亮区域为标准圆,其法线方向与椭圆投影有联系,以此解决高亮区域的三维重建
SLAM算法改进
- 2021 Effectiveness of synthetic data generation for capsule endoscopy
- EndoSLAM model的应用与验证
- 2021 ORB-SLAM3 【开源代码】 基于特征的视觉-惯性 SLAM 系统,该系统完全依赖于最大后验(MAP)估计,甚至在 IMU 初始化阶段也是如此。因此,该系统可在室内和室外、小型和大型环境中实时稳健运行,其精确度是以往方法的两到十倍。鲁棒性高。重建速度~200ms
- 2023 Bimodal Camera Pose Prediction for Endoscopy
- 使用虚拟模型创建结肠镜检查中相机位姿估计的数据集 SimCol,以及一种明确学习双峰分布来预测相机位姿的新方法
-
2023 OneSLAM
- 基于TAP模型,可跟踪多个帧的稀疏对应关系,并运行局部捆绑调整,以共同优化摄像机位姿和肠道的稀疏三维重建。改进了endo-SLAM,随序列变长漂移量变大,FPS 2-4。补充资料:TAPIR: Tracking Any Point with per-frame Initialization and temporal 2023
- 2023 Endomapper dataset of complete calibrated endoscopy procedures
- Endomapper 数据集,首个包含内窥镜校准和原始校准视频的内窥镜数据集。VSLAM 的目标是在内窥镜插入过程中实时绘制三维地图。人体表面的纹理较差,并且由于液体而产生大量反射。场景几何形状普遍存在变形。视频中既有对感兴趣区域的慢速观察,也有内窥镜镜头的快速运动和长时间遮挡。
- 2023 3D Gaussian Splatting for Real-Time Radiance Field Rendering
- 3D 高斯增强渲染真实性 >6min
-
- 基于RGBD图像,提升重建速度与质量,速度100fps
-
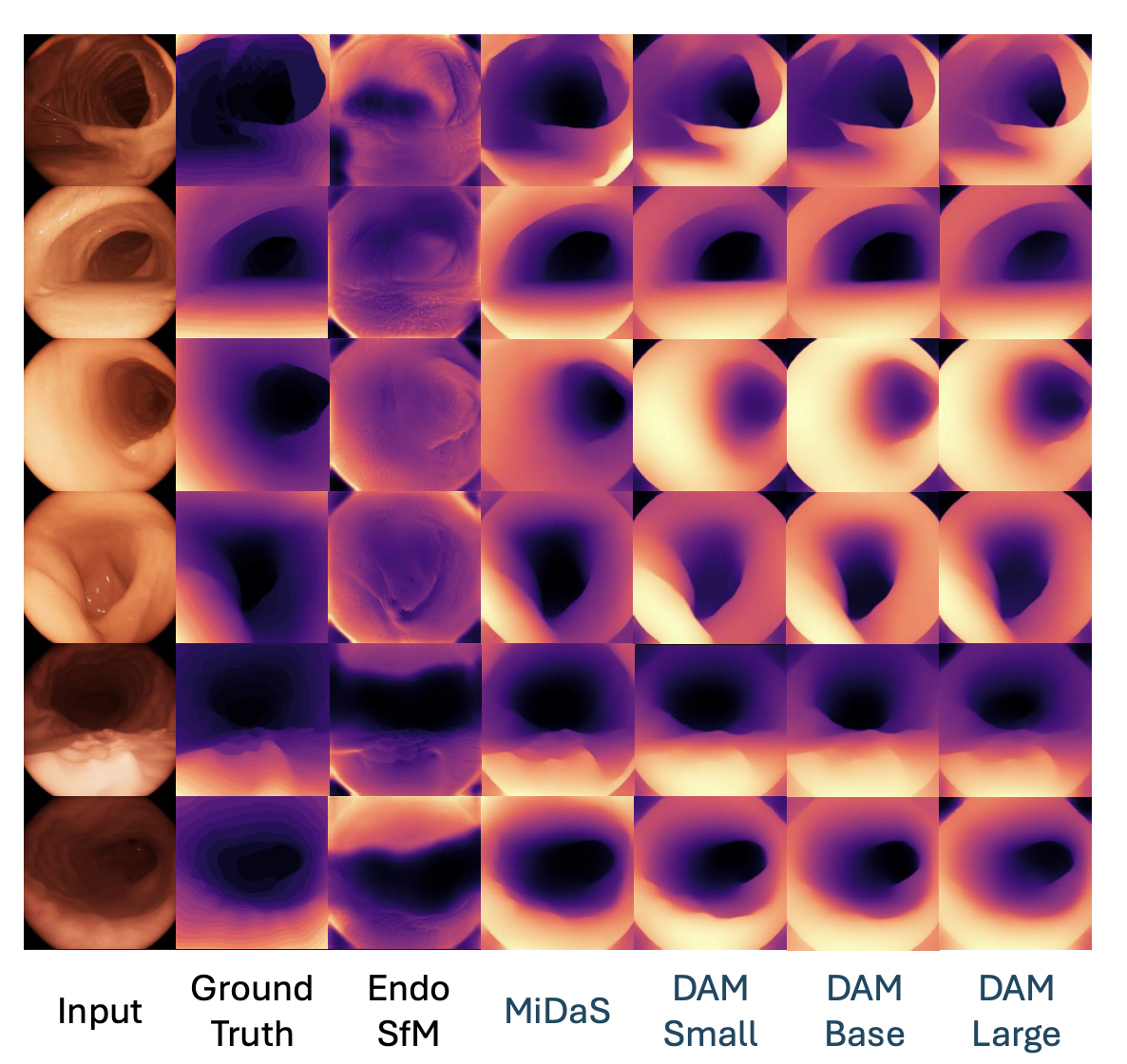
2024 D EPTH A NYTHING IN M EDICAL I MAGES : A C OMPARATIVE S TUDY
- 通用大模型估计深度
自监督网络
-
2020 EndoSLAM dataset and an unsupervised monocular visual odometry and depth estimation approach for endoscopic【代码】
- 内窥镜 SLAM 数据集,该数据集由六个猪器官的三维点云数据、胶囊和标准内窥镜记录、和计算机断层扫描(CT)扫描地面实况组成。从八个活体猪胃肠道器官和一个硅胶结肠模型中收集数据。总共提供了 35 个子数据集,其中体内部分为 6D 姿态Ground Truth:其中 18 个子数据集用于结肠,12 个子数据集用于胃,5 个子数据集用于小肠,而其中 4 个子数据集包含息肉。无监督的单目深度和姿态估计方法,它将残差网络与空间注意力模块相结合,以指示网络关注可区分的高纹理组织区域。
-
2021 Endo-Depth-and-Motion: Reconstruction and Tracking in Endoscopic Videos using Depth Networks and Photometric Constraints 【代码】补充资料:Depth from Motion
- 利用自监督深度网络生成伪 RGBD 帧,然后跟踪相机姿态。
The interest for applying SfM/SLAM in intracorporeal sequences has risen following the advances of the field, but encounters the challenges mentioned before. Early monocular approaches were based on the Extended Kalman Filter [36], [37]; and more recent ones on non-linear optimization for tracking and mapping [6] and map densification using variational approaches [38] or multi-view stereo [39]. These methods were strongly based on the rigidity assumption. MIS-SLAM [40], [41] was the first bringing deformable SLAM to intracorporeal images. It uses a canonical shape, as DynamicFusion [42], integrating stereo observations in a Truncated Signed Distance Function (TSDF) [43] with a deformation model. It uses the rigid tracking of ORB-SLAM2 [2] to estimate the camera pose between keyframes. DefSLAM [44] was the first monocular SLAM fully addressing deformations in monocular endoscopies. SD-DefSLAM [45] improves over it incorporating an illumination-invariant Lukas-Kanade tracker, relocalization and tool segmentation. Both of them use at their core an isometric NRSfM (IsoNRSfM) [10] over a sliding window and a robust deformation tracking inspired in [46]. Although IsoNRSfM models intracorporeal deformations, it assumes that the scene is a continuous surface, which does not hold for many in-body scenes. In addition, even in [45], feature correspondence keeps being a challenge. As another drawback, deformable tracking is computationally demanding. Compared to them, our Endo-Depth can be a fair substitute of IsoNRSfM for deformable SLAM. And, under the assumption of slow deformations, our high-keyframe-rate odometry allows Endo-Depth-and-Motion to achieve long tracks in both rigid and deformable in-body sequences.
-
- 自监督单目深度估计框架 腹腔镜
-
2023 Self-supervised monocular depth estimation for gastrointestinal endoscopy
- 一种自监督神经网络框架+双注意力机制,并行预测分支获得的深度信息和姿态信息重建图像,重建后的图像作为自监督信号指导网络模型训练。
-
2024 MonoLoT: Self-Supervised Monocular Depth Estimation in Low-Texture Scenes for Automatic Robotic Endoscopy 【代码】
- 自监督单目深度估计框架
临床实验
-
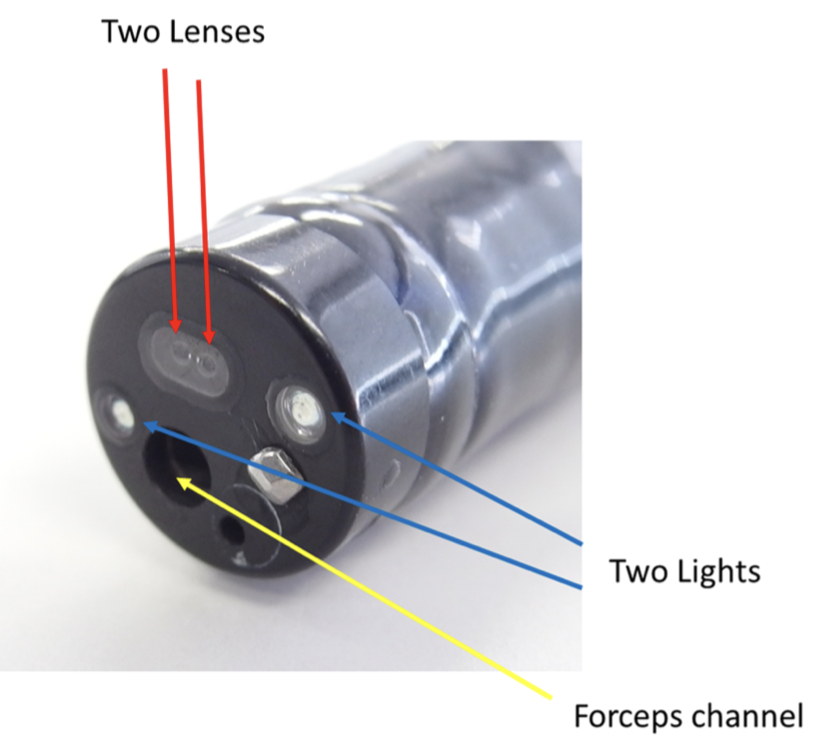
- 奥林巴斯预研的胃黏膜模型模拟实验,3D的效果通过佩戴3D眼镜来实现
-
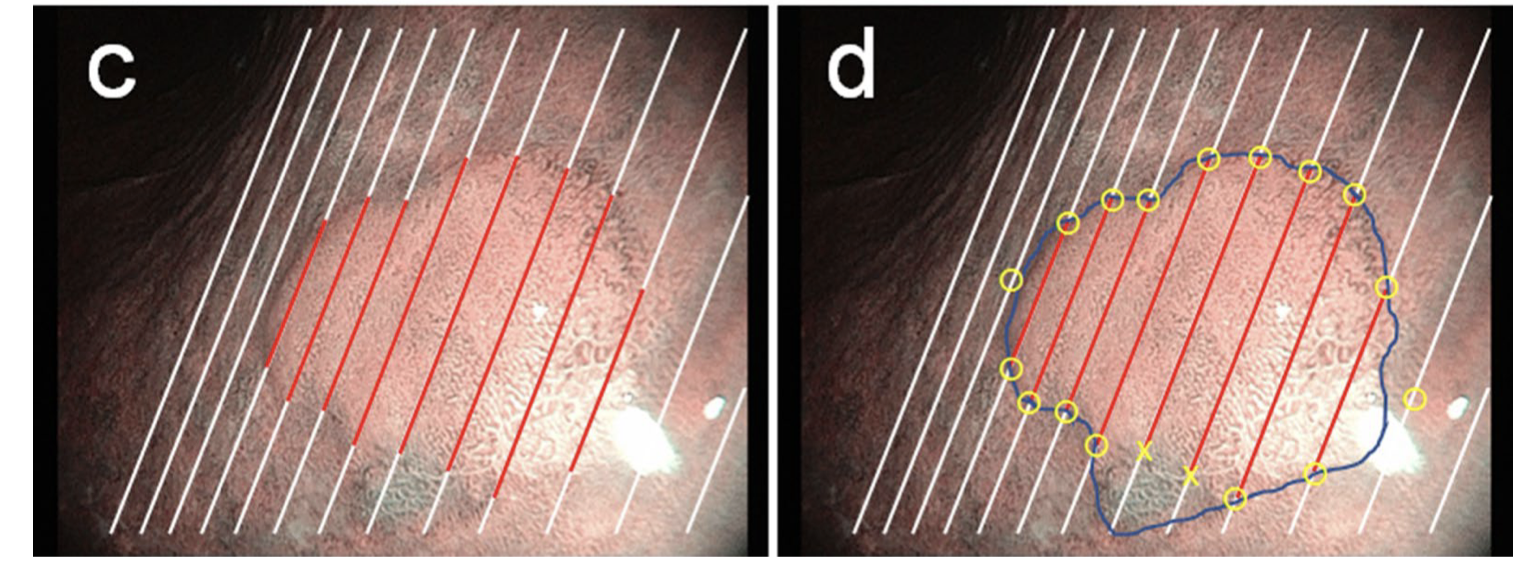
2021 Three-dimensional visualization improves the endoscopic diagnosis of superficial gastric neoplasia
- 奥林巴斯3D内窥镜产品的临床应用,识别肿瘤边缘
-
- 奥林巴斯实验探讨纹理和颜色增强成像(TXI)与放大内镜(ME)在浅表非髓质十二指肠上皮肿瘤(SNADET)术前诊断中的实用性。